projects>
- panaudia
- electricsql
- editboard
- iot desk
- earth rover
- augment00
- opendesk
- fieldnotes
- printcraft
- cloudmaker
- tod
- ppt
- vicarious
- designer
- digirostrum
- krummz
- cleverflows
- tim head
- swap
- mouse organ
- brainstorm
- nvision
- dvace
info>
Technology
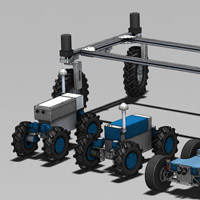
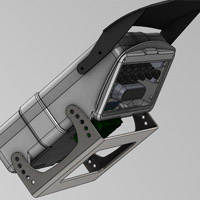
Earth Rover
Autonomous Farming with robots
CTO
2017-19

Earth Rover is a UK start-up aiming to provide the first robotic agriculture system that is genuinely viable for farmers. We are driven by the need to bridge the gap between today's farming methods and the autonomous farm of the future. We call our approach the "pragmatic transition": combining best-in-class technologies with existing equipment to deliver working applications - such as scouting, weeding and selective harvesting - that help farmers improve productivity. Earth Rover Website

Technology